Tämä on projektin esittelysivu ja siihen on koottu maistiaisiksi kuvia keskusteluketjusta. Osa kuvista toimii linkkeinä siihen kohtaan viestiketjua, jossa kuvaa on käytetty. Kuvalinkin tunnistat hiiren kursorin muuttumisesta sormeksi tällaisen kuvan kohdalla.
Viime talvena tehtiin Tampereen teknillisen yliopiston Konstruktiotekniikan laitoksella diplomityö, jossa tavoiteltiin kolmipyörän ongelmien ratkaisemista käytännönläheisellä hands on-metodilla. Juhani Grönlundin diplomityön tavoitteena oli rakentaa kunnianhimoisen suunnitelman mukaisesti kolmipyörä, jossa on ratkaistu kolmipyörää vaivaavat vetävän pyörän pienen painon ja kolmen kulku-uran aiheuttamat ongelmat.
Kaksiraiteinen kolmipyörä
Alusta lähtien oli tarkoituksena nimenomaan tehdä konkreettinen pyörä samalla huomioiden valmistustekniikassa piensarjatuotannon mahdollisuudet kohtuullisin työkaluvaatimuksin. Toinen tavoite suunnittelussa oli huomioida suurempien valmistusmäärien vaatimukset niin, että osavalmistus olisi helppo ja halpa siirtää kauemmaksikin toteutettavaksi.
Käytännössä tuo tarkoitti osien koon ja muodon rajoittamista sellaisiksi, että ne on helppo pakata tiiviisti konteissa kuljetettavaksi. Esimerkkinä käytimme Ikean tuotteita, jotka käytännössä kaikki tehdään jossain kaukana, ne ovat siitä huolimatta edullisen hintaisia, koska suunnitteluun on uhrattu ajatustyötä myös kuljetukset ja alihankinta huomioiden. Käytännössä tämä tarkoittaa, että pyörä oli saatava purettua helposti käsiteltäviin (litteisiin) kohtuullisen kokoisiin pahvilaatikoihin, eli pyörän osien piti olla mahdollisuuksien mukaan tasomaisia, jolloin niitä saattoi pakata tiiviisti.
Pyörään tehtiin klamppien (putkipuristimien) ja muutaman ruuvin avulla neljästä pääosasta koottava runko. Ketjuvoimien hallitsemiseksi ketju vedettiin sivurunkoa pitkin, jolloin pyörän lujuusvaatimusten kannalta suurin voima, ketjuvoima, otettiin vastaan mahdollisimman suoraan ilman suuria taivutus tai vääntörasituksia.
Ympäri kiertävänä runkoputkena käytettiin 30 x 1,5 putkea. Takaosan selkänojan putkena ja vetävän kiekon haarukkana 25 x 1,5 putkea ja mm etupyörän ripustuksessa 20 x 15 putkea. Putkikokojen valinta johtui lähinnä taivutuskoneen lestien kokojakaumasta.
Sivulla kulkevan ketjulinjan takia valittiin poljinkampien sijaan kampiakseli, joka kiinnitettiin sivurunkoihin -sekin putkipuristimilla, mikä mahdollisiti helpon tavan säätää pyörää polkijan mittoihin. Kampiakselin tekeminen oli tälläkin foorumilla nähty aika työlääksi monine hitsauksineen, joita varten tarvittiin jigi.
Teimme tähän pyörään kampiakselin 25 mm hydrauliikkaputkesta taivuttamalla. Kampiakselin päät suunniteltiin siten, että laakeripesät ovat kiinni itse akselissa, eivätkä rungossa, jotta ne olisivat aina aksein suhteen suorassa. Laakerien sisärenkaat kiinnittyivät pallomaisiksi sorvattujen putkipuristimet kiristävien pulttien kantoihin. Tämä menetelmä mahdollistaa kampiakselin säätämisen ilman tarkkaa mittaamista, koska laakerit ovat aina suorassa. Kampiakselin toisen pään laakeripesästä tehtiin kartiomainen yhden ruuvin avulla kiinnitettävä ja irroitettava, jotta polkimien laakerit saattoi pujottaa tuosta päästä paikoilleen.
- 2r3p-16.jpg (22.38 KiB) Katsottu 2135 kertaa
Poljinlaakerit olivat sisäreiältään 30 mm ja ne sovitettiin kampiakselin mutkiin halkaistujen muovisten holkkien avulla.
Kaksiraiteisuuden ja suuren vetävän pyörän kuorman yhdistelmä vaatii vetävän pyörän siirtämistä kuljettajan viereen painopisteen akselille. Kuljettajan navan kohdalle. Jotta etupyörälle olisi jäänyt kuormaa ohjauksen varmistamiseksi siirsimme takapyörän kuskin takapuolelle. Tämä järjestely vaati ohjauksen myös takapyörään. Pyörässä on siis kaksi ohjaavaa pyörää peräkkäin ja yksi kiinteä pyörä keskellä toisella sivulla. Painojakaumaksi muodostui 55% 30% 15%.
Ohjauksesta tuli tämän pyöräprojektin vaikeimmin suunniteltava osio. Pitihän takapyörän kääntyä eri suuntaan, kuin etupyörän ja selvästi vähemmän, kuin etupyörän. Monien laskelmien, mittausten ja kokeilujen jälkeen pyörä saatiin liikkumaan laahaamatta mitään pyörää hyvinkin jyrkkiä mutkia. Vaikka pyörä on kaksi metriä pitkä, kääntyy se helposti 4 m kaistalla u-käännöksen. Pyörää ohjataan eteen-taakse kallistuvalla ohjaussauvalla oikealla kädellä. Sauvassa on myös etupyörään vaikuttava jarrukahva.
- 2r3p-6.jpg (20.19 KiB) Katsottu 2131 kertaa
- 2r3p-7.jpg (12.82 KiB) Katsottu 2130 kertaa
- 2r3p-15.jpg (18.96 KiB) Katsottu 2134 kertaa
Tilansäästösyistä kääntyviin pyöriin tehtiin loivat ohjausakselit. Varsinkin kääntyvä takapyörä kääntyy hyvin vinon akselin ympäri. Homma toimii, joskin loivempiakin kulmia olisi voinut käyttää. Ajokin etupyörässä käytettiin ulokeakselia, joka saatiin Bilteman BMX varaosakiekosta. Tuossa oli 14 mm akseli, jota siirrettiin kiertämällä toiselle sivulle ja puristettiin omalla mutterillaan toispuoleisen haarukan putkeen kiinni.
- 2r3p-14.jpg (22.9 KiB) Katsottu 2140 kertaa
Takapyörään tehtiin vaakasuora haarukka, jotta olisi mahdollista käyttää napamoottorillista kiekkoa kääntyvässä takapyörässä.
- 2r3p-10.jpg (14.54 KiB) Katsottu 2129 kertaa
Vetävä takapyörä on nyt Biltema BMX takapyörä. 48 pinnaa ja kohtalaisen tukeva vanne. Tällä pyörällä on kuormaa saman verran, kuin 406 pystypyörän takapyörällä. Ainakin kovapaineisen paksun BMX-renkaan se tarvitsee. Nykyinen lastenpyörän 2,5 bar ei riitä kunnon rullaukseen.
Pyörän istuin suunniteltiin tehtäväksi tekstiilihihnasta ommeltavasta verkosta, joka pujotetaan kunkin hihnan päihin ommeltujen lenkkien avulla takarunkoon. Toistaiseksi ompelutyö on tekemättä ja istuinremmi on vain pyöriteety rungon ympärille. Hämmästyttävän hyvin toimii noinkin.
- 2r3p-6.jpg (20.19 KiB) Katsottu 2131 kertaa
Pyörä on matala, eikä painopisteen korkeus mahdollista pyörän kaatumista asfaltin kitkakertoimella. Rotvallin reunaan ajamalla sen kuitenkin varmaan saa kaatumaan.
Viimeeksi kun näin pyörän siinä ei vielä ollut lokasuojia, jollaisen se ilman muuta vaatii vetävän pyörän ympärille, sillä kuljettajan vasen käsi on suunniteltu lepäävän tuon lokasuojan päällä. Vaihdevipu ja vetävän pyörän jarru on ajateltu kiinnitettäväksi tuon lokasuojan etupuolelle.
Tarkoitus on tehdä tästä pyörästä kattava open source dokumentisto, jota hyödyntäen pyörää saattaa kuka tahansa alkaa valmistaa. Saapas nähdä, kuinka käy. Opinnäytetyötään tehnyt opiskelija on joutunut palkkatöihin. ![]()
Minulla ei ole kuvia pyörästä, mutta niitä on mm. Pastorilla. Täydennellään tekstiä sitä mukaa, kun kuvia ja kysymyksiä tulee. Toivottavasti myös Juhani (tämä opiskelija) itsekin ehtii osallistumaan tämän tekstin täydentämiseen. Ehkä lopullinen dokumentti kannattaisi rakentaa tuonne wikin puolelle, mutta kootaan sitä johonkin vaiheeseen tässä.
- 2r3p_ani.gif (81.17 KiB) Katsottu 2127 kertaa
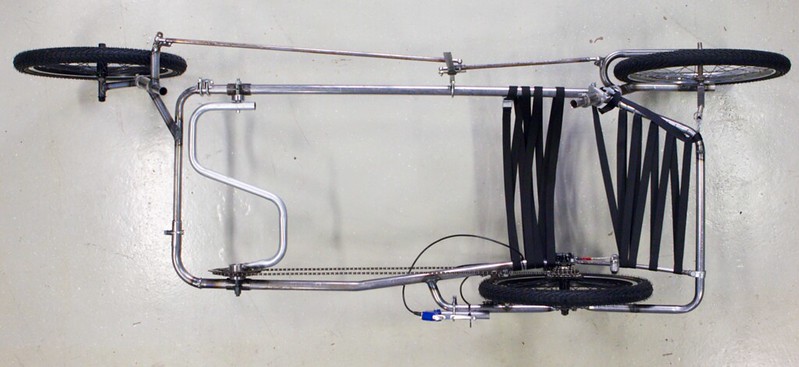
Tässä yksityiskohtia vielä hiukan keskeneräisestä pyörästä. Kuva on linkki, josta löytyy lisää yksityiskohtakuvia.
Esi-isä
Vasen takapyörä tyhjänä 8 kg kuormalla 69.1 kg = 52%
Oikea takapyörä tyhjänä 3,4 kg kuormalla 41,1 kg= 31%
Oikea etupyörä tyhjänä 6,7 kg kuormalla 21,1 kg= 16%
Yhteensä pyörä tyhjänä 18,1 kg kuormalla 131,3 kg=100%
Isoveli

Yksityiskohtia lisää kuvan linkistä.
Tämä projekti sai jälkeläisiä
2T3, two track trike
Kaksiraiteinen kolmipyörä
Samaan aikaan toisaalla...
- PICT0544.jpg (36.38 KiB) Katsottu 2126 kertaa
Takapyörän ohjauksen herättämän kiinnostuksen vuoksi tässä kuva z-ketjumekanismista, jolla saadaan niin haluttaessa takapyörä(t) kääntymään pienillä ohjauskulmilla etupyörien kanssa hieman samaan suuntaan, pysymään paikoillaan tai kääntymään vastakkaiseen suuntaan riippuen z-linjan geometriasta, mutta suurilla kulmilla hitaassa ajossa takapyörät kääntyvät ilman laahausta vastakkaiseen etupyörien suhteen vastakkaiseen suuntaan. Mekanismi toimi hyvin, mutta jäi toteuttamatta, koska ohjaus toimi myös kovemmassa vauhdissa ilmankin.
Liikuttava mekanismi oikealla kuvassa työntää ja vetää ketjua (etuojauksesta tuleva liike) siirtää takaraidetankoa liikuttavaa lattaa (kiinni ketjussa z-keskellä ja kurottuu siitä vasemmalle). Pienillä ketjun liikkeillä latan vasen pää ei juuri liiku, tai liikkuu vain hiukan riippuen z-käyrän tarkasta muodosta, kun liike on suurepi, siirtyy liikuttava pää z-muodon vaakasuorille osille ja liike on yhtä nopeaa kuin ketjunkin.